How To Add New Model
Here is brief instruction about how to add a new model in this frame work. All models are inherited from jinq::models::BaseAiModel<INPUT, OUTPUT>. INPUT and OUTPUT was defined by users which helps a lot when users have different type of input data. The process of running the model is mainly divided into three steps. Firstly transform the user defined input data into model’s internal input data type which usually is a OpenCV mat. Secondly do model inference. Finally transform model’s internal output data type into user defined output data type. I will show you an example to help you add a new densenet image classification model.
Step 1: Define Your Own Input Data Type :cowboy_hat_face:
For example your model’s input data type is a base64 encoded image. You may add the new input data in model_io_define.h
namespace io_define {
namespace common_io {
struct base64_input {
std::string input_image_content;
};
} // namespace common_io
Step 2: Define Your Own Output Data Type :monkey_face:
For beginners you’d better use the default output type. Default model’s output data type for different kind of vision tasks can be found in model_io_define.h. Those structs which are named after std** represent the default model output.
For example the default model output for classification task is
namespace classification {
struct cls_output {
int class_id;
std::vector<float> scores;
};
using std_classification_output = cls_output;
}
class_id equals max score’s idx in scores.
the default model output for object detection task is
namespace object_detection {
struct bbox {
cv::Rect2f bbox;
float score;
int32_t class_id;
};
using std_object_detection_output = std::vector<bbox>;
}
bbox consist of the obj’s location, catogory and confidence. Object detection’s result of image is a set of bboxes.
Step 3: Implement The Transform Function from User Defined Input to Model’s Internal Input :dog:
Usually the model’s input is a OpenCV format mat which can be seen at densenet.inl#L33-L35. User should implement the function to transform user defined input into internal input by themselves.
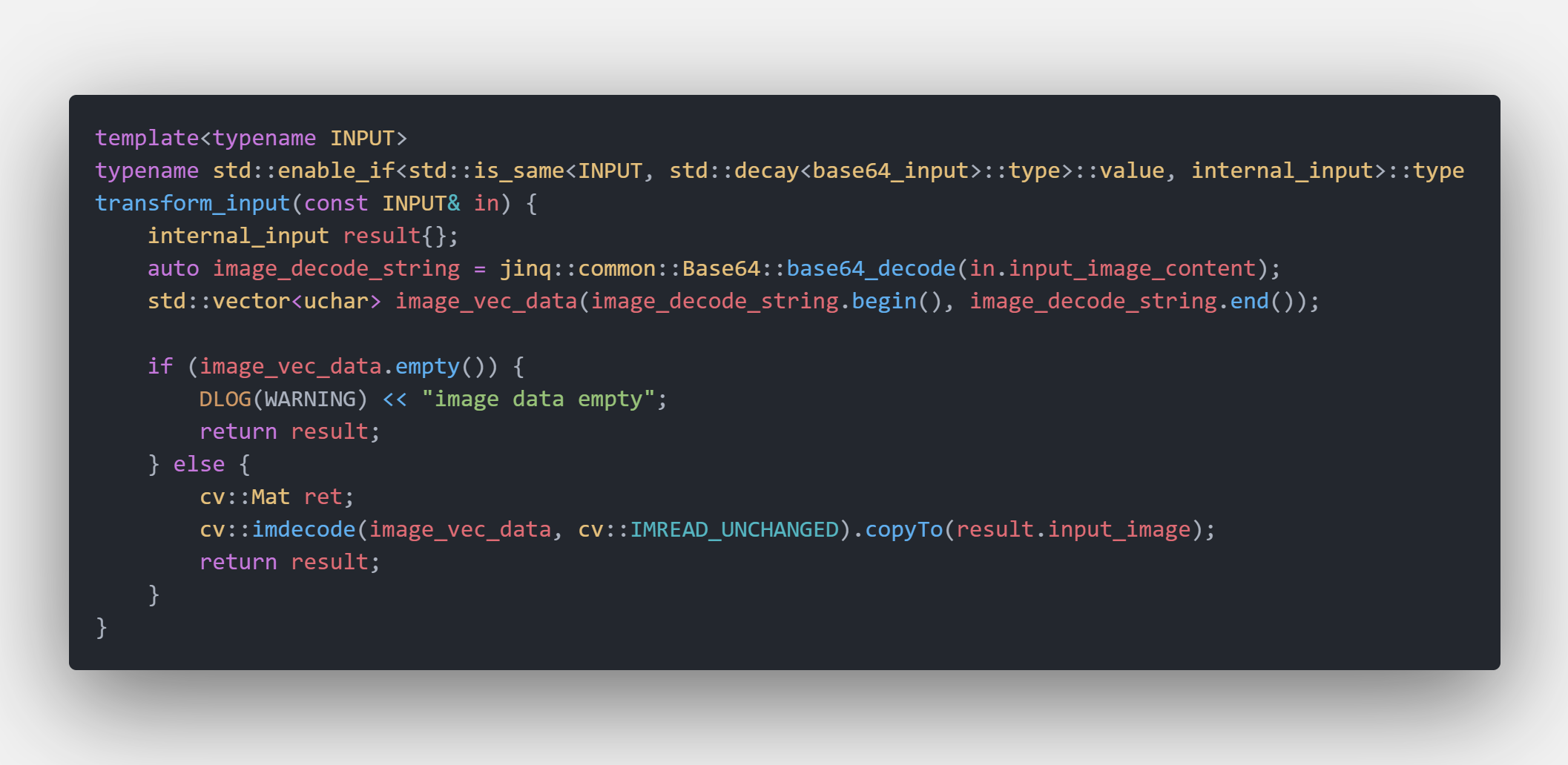
For example if you defined a base64 encoded image as your input data type. Then you’re supposed implement the transform funciton at densenet.inl#L73-L94
Step 4: Implement The Transform Function from User Defined Output to Model’s Internal Output :pig_nose:
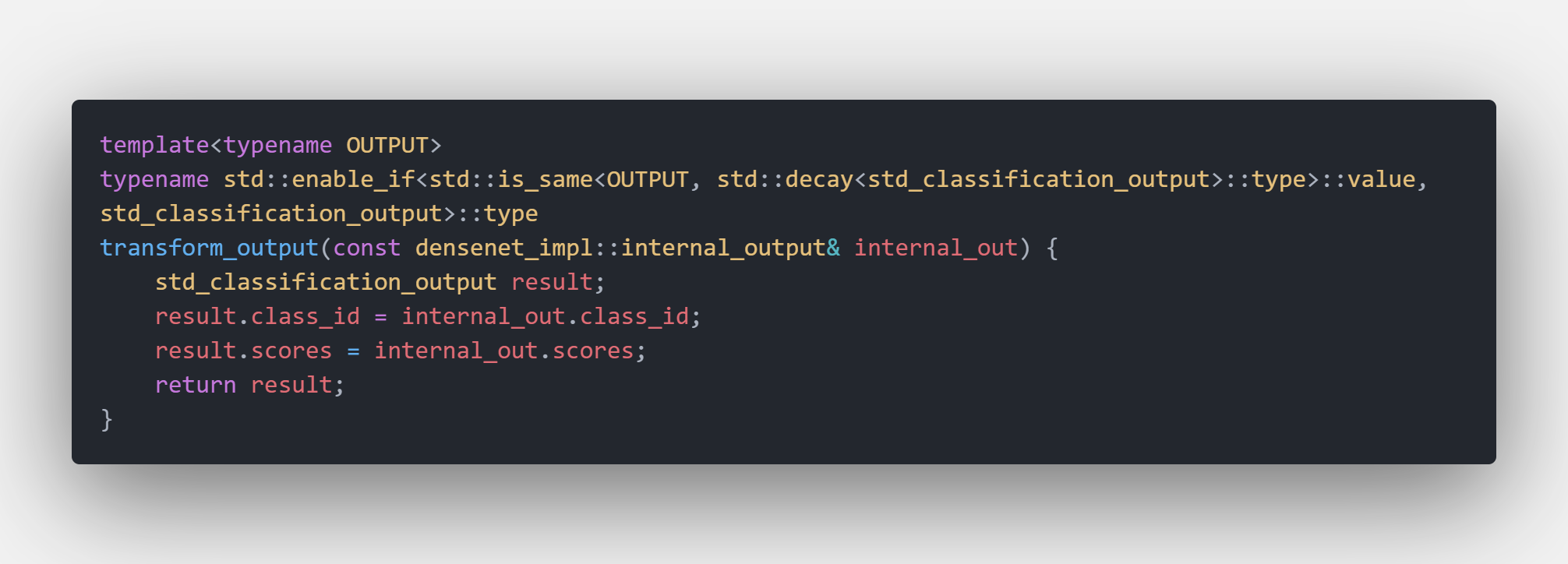
If you use the default output type then your transform function equals a simple assignment funciton like densenet.inl#L96-L110
Of course you may define your own customized output data format.
Step 5: Implement The init Interface Function :mouse:
Usually model’s init function is used to setup model’s interpreter, session, tensor resource and determinate the computing backend. You may checkout densenet.inl#L199-L343 for details. Init funciton’s structure is
/***
*
* @param config
* @return
*/
template<typename INPUT, typename OUTPUT>
StatusCode DenseNet<INPUT, OUTPUT>::Impl::init(const decltype(toml::parse(""))& config) {
// do init task
...
return StatusCode::OK;
}
Step 6: Implement The run Interface Function :elephant:
This interface function is responsible for the main model inference process. Three major modules of this process are first transfor input second run model’s session finally transfor output. The main code for densenet model is
/***
*
* @tparam INPUT
* @tparam OUTPUT
* @param in
* @param out
* @return
*/
template<typename INPUT, typename OUTPUT>
StatusCode DenseNet<INPUT, OUTPUT>::Impl::run(const INPUT& in, OUTPUT& out) {
// first transform external input into internal input
auto internal_in = densenet_impl::transform_input(in);
if (!internal_in.input_image.data || internal_in.input_image.empty()) {
return StatusCode::MODEL_EMPTY_INPUT_IMAGE;
}
// second run session
auto preprocessed_image = preprocess_image(internal_in.input_image);
MNN::Tensor input_tensor_user(_m_input_tensor, MNN::Tensor::DimensionType::TENSORFLOW);
auto input_tensor_data = input_tensor_user.host<float>();
auto input_tensor_size = input_tensor_user.size();
::memcpy(input_tensor_data, preprocessed_image.data, input_tensor_size);
_m_input_tensor->copyFromHostTensor(&input_tensor_user);
_m_net->runSession(_m_session);
MNN::Tensor output_tensor_user(_m_output_tensor, MNN::Tensor::DimensionType::TENSORFLOW);
_m_output_tensor->copyToHostTensor(&output_tensor_user);
auto* host_data = output_tensor_user.host<float>();
// finally transform output
densenet_impl::internal_output internal_out;
for (auto index = 0; index < output_tensor_user.elementSize(); ++index) {
internal_out.scores.push_back(host_data[index]);
}
auto max_score = std::max_element(host_data, host_data + output_tensor_user.elementSize());
auto cls_id = static_cast<int>(std::distance(host_data, max_score));
internal_out.class_id = cls_id;
out = densenet_impl::transform_output<OUTPUT>(internal_out);
return StatusCode::OK;
}
Step 7: Add New Model Into Task Factory :factory:
Task factory is used to create model object. Details about this can be found classification_task.inl#L86-L98
/***
* create densenet image classification
* @tparam INPUT
* @tparam OUTPUT
* @param detector_name
* @return
*/
template<typename INPUT, typename OUTPUT>
static std::unique_ptr<BaseAiModel<INPUT, OUTPUT> > create_densenet_classifier(
const std::string& classifier_name) {
REGISTER_AI_MODEL(DenseNet, classifier_name, INPUT, OUTPUT)
return ModelFactory<BaseAiModel<INPUT, OUTPUT> >::get_instance().get_model(classifier_name);
}
Step 8: Make A Benchmark App For New Model :airplane:
You have already add a new ai model till this step. Now let’s make a benchmark app to verify your new model. Comple code can be found densenet_benchmark.cpp
int main(int argc, char** argv) {
// construct model input
std::string input_image_path = "../demo_data/model_test_input/classification/ILSVRC2012_val_00000003.JPEG";
cv::Mat input_image = cv::imread(input_image_path, cv::IMREAD_COLOR);
struct mat_input model_input {
input_image
};
std_classification_output model_output{};
// construct detector
std::string cfg_file_path = argv[1];
LOG(INFO) << "config file path: " << cfg_file_path;
auto cfg = toml::parse(cfg_file_path);
auto classifier = create_densenet_classifier<mat_input, std_classification_output>("densenet");
classifier->init(cfg);
if (!classifier->is_successfully_initialized()) {
LOG(INFO) << "densenet classifier init failed";
return -1;
}
// run benchmark
int loop_times = 1000;
LOG(INFO) << "input test image size: " << input_image.size();
LOG(INFO) << "classifier run loop times: " << loop_times;
LOG(INFO) << "start densenet benchmark at: " << Timestamp::now().to_format_str();
auto ts = Timestamp::now();
for (int i = 0; i < loop_times; ++i) {
classifier->run(model_input, model_output);
}
auto cost_time = Timestamp::now() - ts;
LOG(INFO) << "benchmark ends at: " << Timestamp::now().to_format_str();
LOG(INFO) << "cost time: " << cost_time << "s, fps: " << loop_times / cost_time;
LOG(INFO) << "classify id: " << model_output.class_id;
auto max_score = std::max_element(model_output.scores.begin(), model_output.scores.end());
LOG(INFO) << "max classify socre: " << *max_score;
LOG(INFO) << "max classify id: " << static_cast<int>(std::distance(model_output.scores.begin(), max_score));
return 1;
}
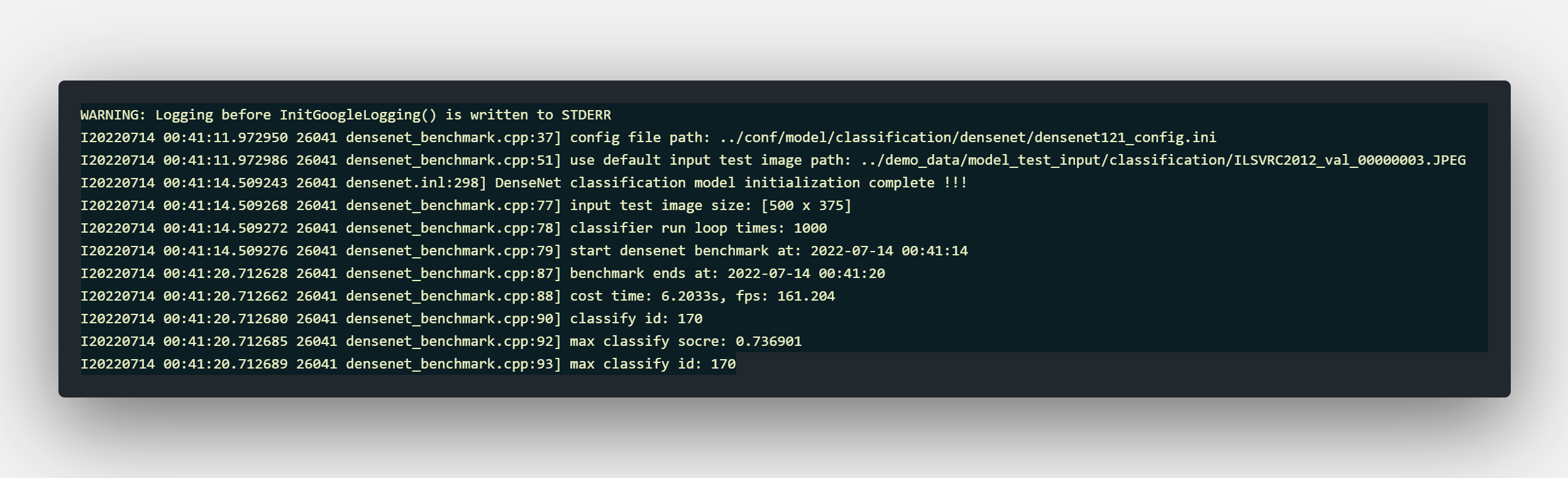
If nothing wrong happened :smile: you should get a similar benchmark result like
densenet benchmark result
Good Luck !!! :trophy::trophy::trophy:
Reference
Complete implementation code can be found